 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe Syntactic-Semantic Internet:Engineering Infrastructures for Autonomous Systems
Jan 31, 2026The Internet has evolved through successive architectural abstractions that enabled unprecedented scale, interoperability, and innovation. Packet-based networking enabled the reliable transport of bits; cloud-native systems enabled the orchestration of distributed computation. Today, the emergence of autonomous, learning-based systems introduces a new architectural challenge: intelligence is increasingly embedded directly into network control, computation, and decision-making, yet the Internet lacks a structural foundation for representing and exchanging meaning. In this paper, we argue that cognition alone: pattern recognition, prediction, and optimization, is insufficient for the next generation of networked systems. As autonomous agents act across safety-critical and socio-technical domains, systems must not only compute and communicate, but also comprehend intent, context, and consequence. We introduce the concept of a Semantic Layer: a new architectural stratum that treats meaning as a first-class construct, enabling interpretive alignment, semantic accountability, and intelligible autonomous behavior. We show that this evolution leads naturally to a Syntactic-Semantic Internet. The syntactic stack continues to transport bits, packets, and workloads with speed and reliability, while a parallel semantic stack transports meaning, grounding, and consequence. We describe the structure of this semantic stack-semantic communication, a semantic substrate, and an emerging Agentic Web, and draw explicit architectural parallels to TCP/IP and the World Wide Web. Finally, we examine current industry efforts, identify critical architectural gaps, and outline the engineering challenges required to make semantic interoperability a global, interoperable infrastructure.
A Survey on Semantic Communication for Vision: Categories, Frameworks, Enabling Techniques, and Applications
Jan 29, 2026Semantic communication (SemCom) emerges as a transformative paradigm for traffic-intensive visual data transmission, shifting focus from raw data to meaningful content transmission and relieving the increasing pressure on communication resources. However, to achieve SemCom, challenges are faced in accurate semantic quantization for visual data, robust semantic extraction and reconstruction under diverse tasks and goals, transceiver coordination with effective knowledge utilization, and adaptation to unpredictable wireless communication environments. In this paper, we present a systematic review of SemCom for visual data transmission (SemCom-Vision), wherein an interdisciplinary analysis integrating computer vision (CV) and communication engineering is conducted to provide comprehensive guidelines for the machine learning (ML)-empowered SemCom-Vision design. Specifically, this survey first elucidates the basics and key concepts of SemCom. Then, we introduce a novel classification perspective to categorize existing SemCom-Vision approaches as semantic preservation communication (SPC), semantic expansion communication (SEC), and semantic refinement communication (SRC) based on communication goals interpreted through semantic quantization schemes. Moreover, this survey articulates the ML-based encoder-decoder models and training algorithms for each SemCom-Vision category, followed by knowledge structure and utilization strategies. Finally, we discuss potential SemCom-Vision applications.
Inferring Operator Emotions from a Motion-Controlled Robotic Arm
Dec 09, 2025A remote robot operator's affective state can significantly impact the resulting robot's motions leading to unexpected consequences, even when the user follows protocol and performs permitted tasks. The recognition of a user operator's affective states in remote robot control scenarios is, however, underexplored. Current emotion recognition methods rely on reading the user's vital signs or body language, but the devices and user participation these measures require would add limitations to remote robot control. We demonstrate that the functional movements of a remote-controlled robotic avatar, which was not designed for emotional expression, can be used to infer the emotional state of the human operator via a machine-learning system. Specifically, our system achieved 83.3$\%$ accuracy in recognizing the user's emotional state expressed by robot movements, as a result of their hand motions. We discuss the implications of this system on prominent current and future remote robot operation and affective robotic contexts.
LEAM: A Prompt-only Large Language Model-enabled Antenna Modeling Method
Apr 25, 2025Antenna modeling is a time-consuming and complex process, decreasing the speed of antenna analysis and design. In this paper, a large language model (LLM)- enabled antenna modeling method, called LEAM, is presented to address this challenge. LEAM enables automatic antenna model generation based on language descriptions via prompt input, images, descriptions from academic papers, patents, and technical reports (either one or multiple). The effectiveness of LEAM is demonstrated by three examples: a Vivaldi antenna generated from a complete user description, a slotted patch antenna generated from an incomplete user description and the operating frequency, and a monopole slotted antenna generated from images and descriptions scanned from the literature. For all the examples, correct antenna models are generated in a few minutes. The code can be accessed via https://github.com/TaoWu974/LEAM.
A semantic communication-based workload-adjustable transceiver for wireless AI-generated content (AIGC) delivery
Mar 24, 2025With the significant advances in generative AI (GAI) and the proliferation of mobile devices, providing high-quality AI-generated content (AIGC) services via wireless networks is becoming the future direction. However, the primary challenges of AIGC service delivery in wireless networks lie in unstable channels, limited bandwidth resources, and unevenly distributed computational resources. In this paper, we employ semantic communication (SemCom) in diffusion-based GAI models to propose a Resource-aware wOrkload-adjUstable TransceivEr (ROUTE) for AIGC delivery in dynamic wireless networks. Specifically, to relieve the communication resource bottleneck, SemCom is utilized to prioritize semantic information of the generated content. Then, to improve computational resource utilization in both edge and local and reduce AIGC semantic distortion in transmission, modified diffusion-based models are applied to adjust the computing workload and semantic density in cooperative content generation. Simulations verify the superiority of our proposed ROUTE in terms of latency and content quality compared to conventional AIGC approaches.
Harnessing DRL for URLLC in Open RAN: A Trade-off Exploration
Jul 24, 2024



The advent of Ultra-Reliable Low Latency Communication (URLLC) alongside the emergence of Open RAN (ORAN) architectures presents unprecedented challenges and opportunities in Radio Resource Management (RRM) for next-generation communication systems. This paper presents a comprehensive trade-off analysis of Deep Reinforcement Learning (DRL) approaches designed to enhance URLLC performance within ORAN's flexible and dynamic framework. By investigating various DRL strategies for optimising RRM parameters, we explore the intricate balance between reliability, latency, and the newfound adaptability afforded by ORAN principles. Through extensive simulation results, our study compares the efficacy of different DRL models in achieving URLLC objectives in an ORAN context, highlighting the potential of DRL to navigate the complexities introduced by ORAN. The proposed study provides valuable insights into the practical implementation of DRL-based RRM solutions in ORAN-enabled wireless networks. It sheds light on the benefits and challenges of integrating DRL and ORAN for URLLC enhancements. Our findings contribute to the ongoing discourse on advancements in URLLC and ORAN, offering a roadmap for future research to pursue efficient, reliable, and flexible communication systems.
Compact Millimeter-Wave Antenna Array for 5G and Beyond: Design and Over-The-Air (OTA) Measurements Using Compact Antenna Test Range (CATR)
Jul 13, 2024



This paper presents the design and comprehensive measurements of a compact high-gain 32 element planar antenna array covering the n257 (26.5-29.5 GHz) millimeter wave (mmWave) band. First an 8-element quasi-uniform linear array is designed using a series-fed topology with fan shaped beams for point-to-multipoint connectivity followed by a compact corporate series feed network to design high-gain directive array for point-to-point connectivity. The radiation patterns of both antenna arrays in the azimuth and elevation planes are measured across a 180 degrees span using an over-the-air (OTA) compact antenna test range (CATR) system with a single rotary positioner. Moreover the procedure for quantifying and measuring the gain of mmWave antenna arrays is demonstrated in detail. The peak measured gain of the planar array is 18.45 dBi at 28.5 GHz while the half-power beamwidth of the planar array in the elevation and azimuth planes varies between 11 to 13 degrees, and 23-27 degrees respectively within the 26.5-29.5 GHz range. The measurement results match well with the simulations. The designed antenna array is suitable for various emerging 5G and beyond mmWave applications such as fixed wireless access, mmWave near-field focusing, high-resolution radar systems, and the characterization of mmWave path loss and channel sounding in diverse indoor environments and smart factories.
An Overview of Intelligent Meta-surfaces for 6G and Beyond: Opportunities, Trends, and Challenges
May 06, 2024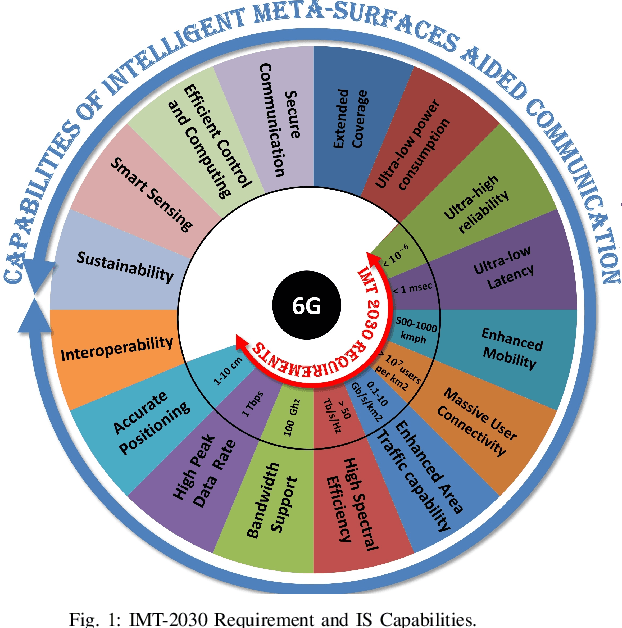
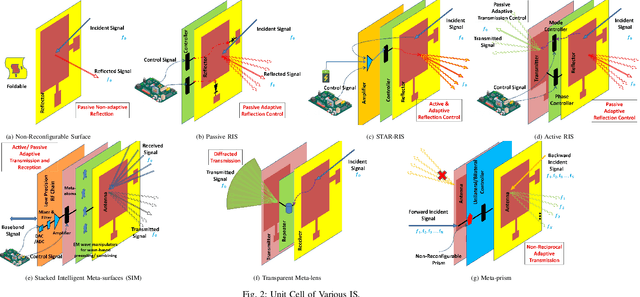
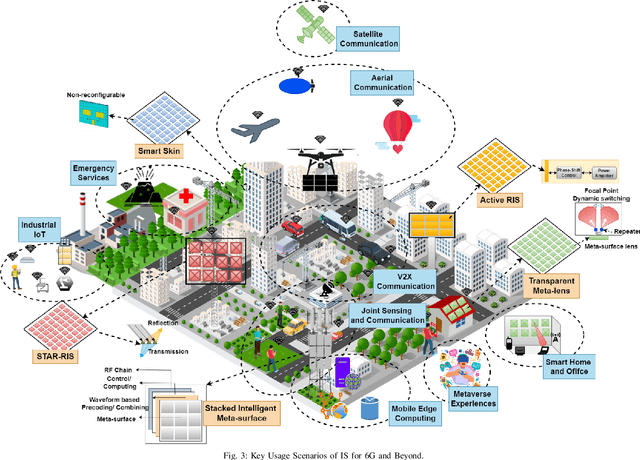
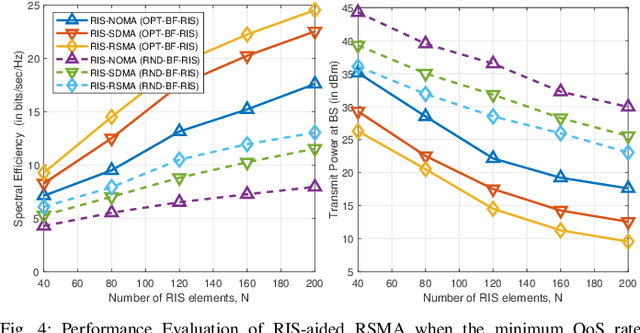
With the impending arrival of the sixth generation (6G) of wireless communication technology, the telecommunications landscape is poised for another revolutionary transformation. At the forefront of this evolution are intelligent meta-surfaces (IS), emerging as a disruptive physical layer technology with the potential to redefine the capabilities and performance metrics of future wireless networks. As 6G evolves from concept to reality, industry stakeholders, standards organizations, and regulatory bodies are collaborating to define the specifications, protocols, and interoperability standards governing IS deployment. Against this background, this article delves into the ongoing standardization efforts, emerging trends, potential opportunities, and prevailing challenges surrounding the integration of IS into the framework of 6G and beyond networks. Specifically, it provides a tutorial-style overview of recent advancements in IS and explores their potential applications within future networks beyond 6G. Additionally, the article identifies key challenges in the design and implementation of various types of intelligent surfaces, along with considerations for their practical standardization. Finally, it highlights potential future prospects in this evolving field.
Use of Parallel Explanatory Models to Enhance Transparency of Neural Network Configurations for Cell Degradation Detection
Apr 17, 2024In a previous paper, we have shown that a recurrent neural network (RNN) can be used to detect cellular network radio signal degradations accurately. We unexpectedly found, though, that accuracy gains diminished as we added layers to the RNN. To investigate this, in this paper, we build a parallel model to illuminate and understand the internal operation of neural networks, such as the RNN, which store their internal state in order to process sequential inputs. This model is widely applicable in that it can be used with any input domain where the inputs can be represented by a Gaussian mixture. By looking at the RNN processing from a probability density function perspective, we are able to show how each layer of the RNN transforms the input distributions to increase detection accuracy. At the same time we also discover a side effect acting to limit the improvement in accuracy. To demonstrate the fidelity of the model we validate it against each stage of RNN processing as well as the output predictions. As a result, we have been able to explain the reasons for the RNN performance limits with useful insights for future designs for RNNs and similar types of neural network.
Blockchain-enabled Clustered and Scalable Federated Learning (BCS-FL) Framework in UAV Networks
Feb 15, 2024



Privacy, scalability, and reliability are significant challenges in unmanned aerial vehicle (UAV) networks as distributed systems, especially when employing machine learning (ML) technologies with substantial data exchange. Recently, the application of federated learning (FL) to UAV networks has improved collaboration, privacy, resilience, and adaptability, making it a promising framework for UAV applications. However, implementing FL for UAV networks introduces drawbacks such as communication overhead, synchronization issues, scalability limitations, and resource constraints. To address these challenges, this paper presents the Blockchain-enabled Clustered and Scalable Federated Learning (BCS-FL) framework for UAV networks. This improves the decentralization, coordination, scalability, and efficiency of FL in large-scale UAV networks. The framework partitions UAV networks into separate clusters, coordinated by cluster head UAVs (CHs), to establish a connected graph. Clustering enables efficient coordination of updates to the ML model. Additionally, hybrid inter-cluster and intra-cluster model aggregation schemes generate the global model after each training round, improving collaboration and knowledge sharing among clusters. The numerical findings illustrate the achievement of convergence while also emphasizing the trade-offs between the effectiveness of training and communication efficiency.